


無人監視システムの紹介
- HOME
- 無人監視システムの紹介
無人監視システム
システム導入の目的
ロボットの導入によるラインの自動化、無人化での問題点は、機器の誤作動や通信障害等で想定外の不具合により停止することです。
これまで共栄製作所(以下、当社)の製作する設備は、基本、エラー表示画面を設け停止の原因を表示していましたが、想定外のエラーの場合は、現地に入り原因調査を行っていました。原因の中には、到着5分で追求できる単純なケアレスミスレベルから半日以上機械の前に張り付き調査しても同様のエラー事象が再現できず、原因不明のケースもありました。
このようは問題は、ロボットを導入している自動化設備の現場オペレーター、生産技術の方、我々セットメーカーならば誰もが必ず経験している事と思われます。
また、今日のコロナ禍の中で「人との接触を極力減らす」働き方改革の一環、また残業時間の減少という流れの中で、どの企業も人との接触を減らし、最短で原因追求をする事でラインの復旧をする事が最大の課題であり、自動化設備を構築するには必須となるシステムと考えています。
「KYOEI ROBOT Lab.(共栄ロボットラボ)」の仮想設備は、この課題を取り上げ、無人監視システムを体感していただける設備を構築しました。
システムの紹介
仮想設備の無人監視システムは、設備の状態や異常をオペレーターに送信します。
外部からでもトラブル発生時は、電気プログラムの記録と設備の動画を受信でき、オペレーターが⽬視で確認し原因追求を出来るシステムを構築しています。
原因究明後は、現地オペレーターに原因の報告と対処法の説明を行い、プログラムの変更が必要な場合は、プログラムを変更し現地オペレーターに送信、再インストールすることで復旧することができます。
最低限の人の介入で設備の復旧ができる事を体感していただけます。
システム全体の流れ
- 1. エラー発生
- 仮想設備でエラーが発生する。
- 2. 記録と録画
- エラー発生時の瞬間にフラグ(電気信号)を立てる。
その間の前後数秒間のプログラムの走りの記録と設備の状態をカメラで録画する。

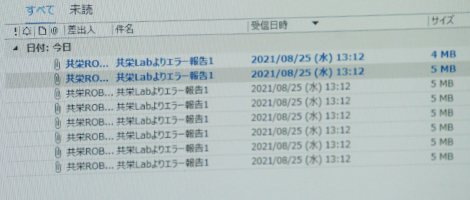
- 3. アラートメール送信
- エラーの状況を外部オペレーターに、記録・録画されたデータを添付しアラートメールとして送信する。
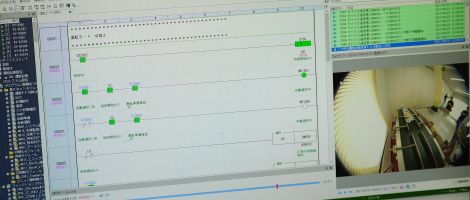
- 4. プログラムとドライブレコーダの解析
- アラートメールを受けた外部オペレーターは、プログラムの解析とドライブレコーダーの解析を行い原因を究明する。
- 5. 原因究明と復旧
- 原因究明後、現地オペレーターに原因の報告と対処法の説明を行う。
プログラムの変更が必要な場合は、プログラムを変更し現地オペレーターに送信しインストールすることで復旧する。

システムの可視化
量産ラインに於いて設備の突発的故障は生産計画を大幅に遅らせ、スケジュール変更を余儀なくされ、特に部品交換が必要なケースは、部品調達に1ヶ月以上かかりラインを停止させる事もあります。このような事が無いように設備の状態を把握し、交換時期、ストックの準備を予め予測できる機能を盛り込んでいます。
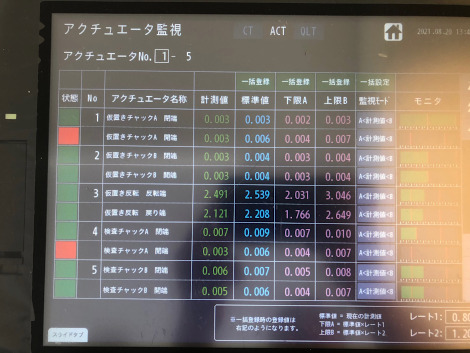
アクチュエータ監視
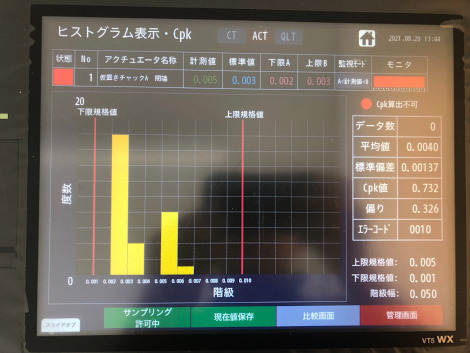
ヒストグラム表示
システムの導入
無人監視システムの導入により、従来は当社の技術スタッフが訪問するまでの時間、また現地についてから同じ事象の再現するまでの時間の大幅な短縮が可能となり、遠方のお客様も安心して設備導入ができると考えています。
また、人との接触が無く設備を復旧させることが可能となることで、今後のロボット設備導入の新たなスタンダードとなっていくことを期待しています。

