


導入事例
- HOME
- 導入事例
導入事例
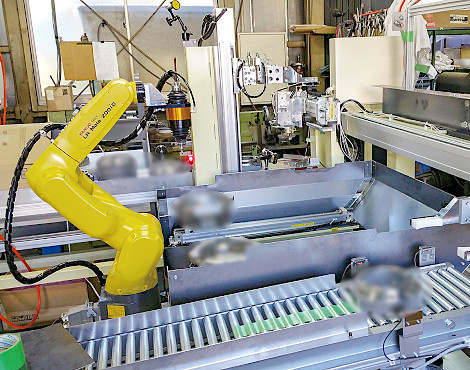

ロボットバリ取りシステム
- 導入先
- F社・愛知県
- ロボットの種類・タイプ
- ファナック LRMate200ID
スピンドルモーター搭載でバリ取り作業 - ロボットの概要
- ハブと呼ばれる自動車部品の曲線状の長穴のプレスバリをスピンドルモーターとフローティングシステムをハンドに取付け超硬ロータリーバーでバリ取りをさせる。形状に沿ったティーチング、C面指示も厳しい為ティーチング作業の難易度はかなり高い。その後2次バリ装置(返りバリ除去装置)(自社製)に通しコンベアに排出


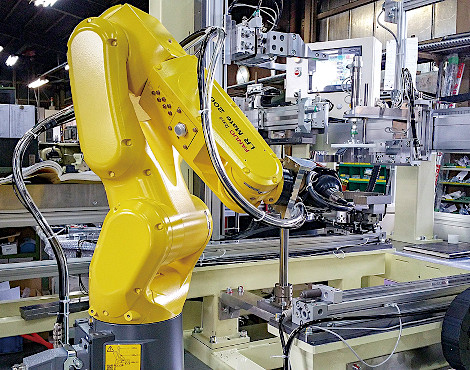
パイプ高周波装置搬送システム
- 導入先
- T社・岐阜県
- ロボットの種類・タイプ
- ファナック M20Ia
搬送+高周波投入+ストッカー段積 - ロボットの概要
- ストッカーに並べられたパイプを内開きの爪で2本づつ取り出し、投入装置付きコンベア(自社製)に搬送。投入ハンドが高周波焼鈍装置(吉田機械製)に高周波焼入れ後再度コンベアに。冷却搬送後ロボットで取り出しストッカーに段積する。パイプの丸形状の段積の為、1列目のパイプ間に2列目のパイプを積むこと、パイプに真円度が出ていない為ティーチング・補正を要した

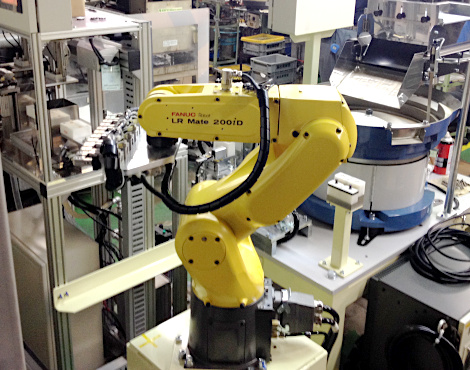
電解バリ取り機 +
洗浄機搬送システム
- 導入先
- S社・愛知県
- ロボットの種類・タイプ
- ファナック LRMate200ID
搬送 - ロボットの概要
- パーツフィーダーから流れてくる建機部品を2本づつ取出し電解バリ取り機(中央製作所製)に投入し完了後洗浄機に搬送する
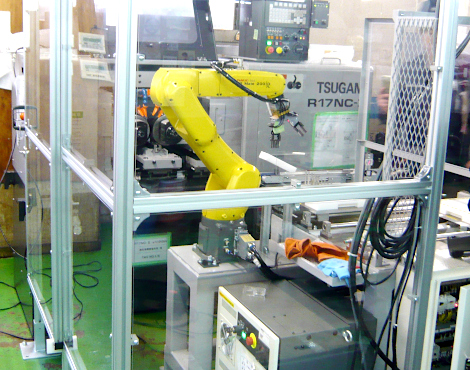

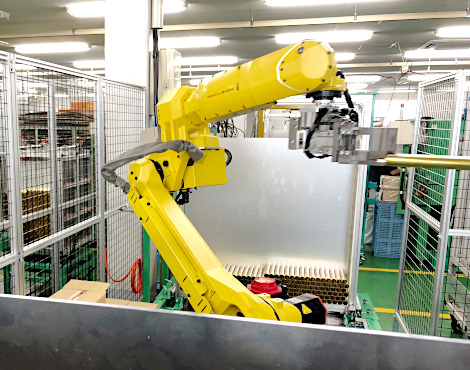
円筒研削盤投入
パレタイジングシステム
- 導入先
- M社・愛知県
- ロボットの種類・タイプ
- ファナック LRMate200ID・7L
機械投入+整列作業 - ロボットの概要
- パレットに100本(10X10)並べた電気部品を1本づつ円筒研削盤(ツガミ製)に投入し研磨終了後からパレットに整列させ無人化を実現


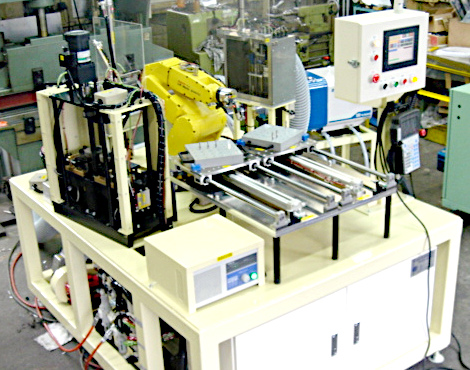
パイプベンダー供給排出システム
- 導入先
- T社・岐阜県
- ロボットの種類・タイプ
- ファナック LRMate200ID
パイプ搬送 - ロボットの概要
- ランダムにストッカーに入れた真鍮パイプを切出し装置(自社製)で1本づつ切出し、ベンダー(自社製)に投入。曲げ終わったパイプを取りだし、コンベアに並べ次工程への搬送

研削盤供給、測長検査システム
- 導入先
- M社・岐阜県
- ロボットの種類・タイプ
- ファナック LRMate200Ib
搬送 - ロボットの概要
- 既存の研削盤(ツガミ製)にロボットでの供給。パレット上に並べた製品を1本づつ取り出し研削盤に供給。加工後、測長検査を行いOK品のみ完成品パレットに整列させる。既存設備への追加仕様の為設計上の制約もあったがロボットを高い位置に設置しハンドの延長対応にて設置
7st搬送システム
- 導入先
- U社・岐阜県
- ロボットの種類・タイプ
- ファナック LRMate200Ib
搬送 - ロボットの概要
- 建機部品を供給パレット⇒内径バリ取り⇒外径ブラシ掛け上下⇒内径ピンポイント洗浄⇒超音波洗浄⇒エアブロー⇒排出の7STを搬送。全行程自社設計の為、非常にコンパクト設計となった。ロボット初導入のユーザー様もロボットの利便性を感じて頂いた。

